通过 coBridge 连接机器
coBridge 是刻行时空提供的一款开源机端软件,目前支持 ros1 noetic、 ros2 foxy 及 humble 版本。cobridge 会以 ros node 的方式运行在机器人端,并通过 websocket 方式与云端进行交互。cobridge 与云端建立链接后,根据云端指令可以实现订阅 ros topic,调用 ros service,实现实时监控机器人状态、远程下发指令等功能。
安装 coBridge
在机器端,打开 terminal,依照以下流程安装 coBridge。
- 导入公钥。
wget https://download.coscene.cn/cobridge/coscene.gpg && sudo gpg --dearmor -o /etc/apt/trusted.gpg.d/coscene.gpg coscene.gpg
- 添加源。
echo "deb [signed-by=/etc/apt/trusted.gpg.d/coscene.gpg] https://download.coscene.cn/cobridge $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/cobridge.list
- 更新apt并安装。
sudo apt update
# 注意: 如果 ROS_DISTRO 没有在你的环境变量里面,${ROS_DISTRO} 需要被 'noetic', 'foxy' or 'humble' 替换
sudo apt install ros-${ROS_DISTRO}-cobridge -y
- 运行 coBridge。
source /opt/ros/${ROS_DISTRO}/setup.bash
# for ros 1 distribution
roslaunch cobridge cobridge.launch
# for ros 2 distribution
ros2 launch cobridge cobridge_launch.xml
使用 coStudio 对机器进行实时可视化
- 下载 coStudio。
- 开启 coStudio 后,选择 “打开连接” 功能。

- 选择 coScene Websocket 选项,在 WebSocket URL 中输入连接地址。
ws://localhost:21274( 21274 为 coBridge 的默认端口号 )。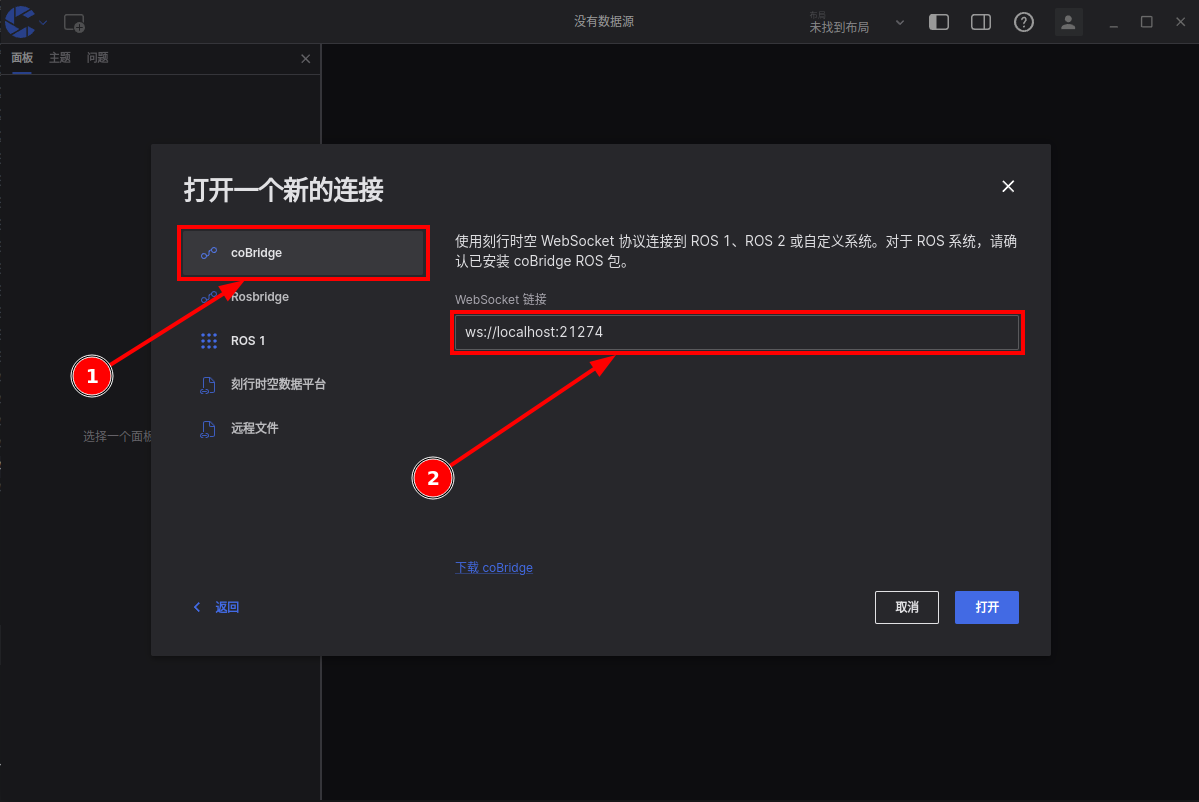
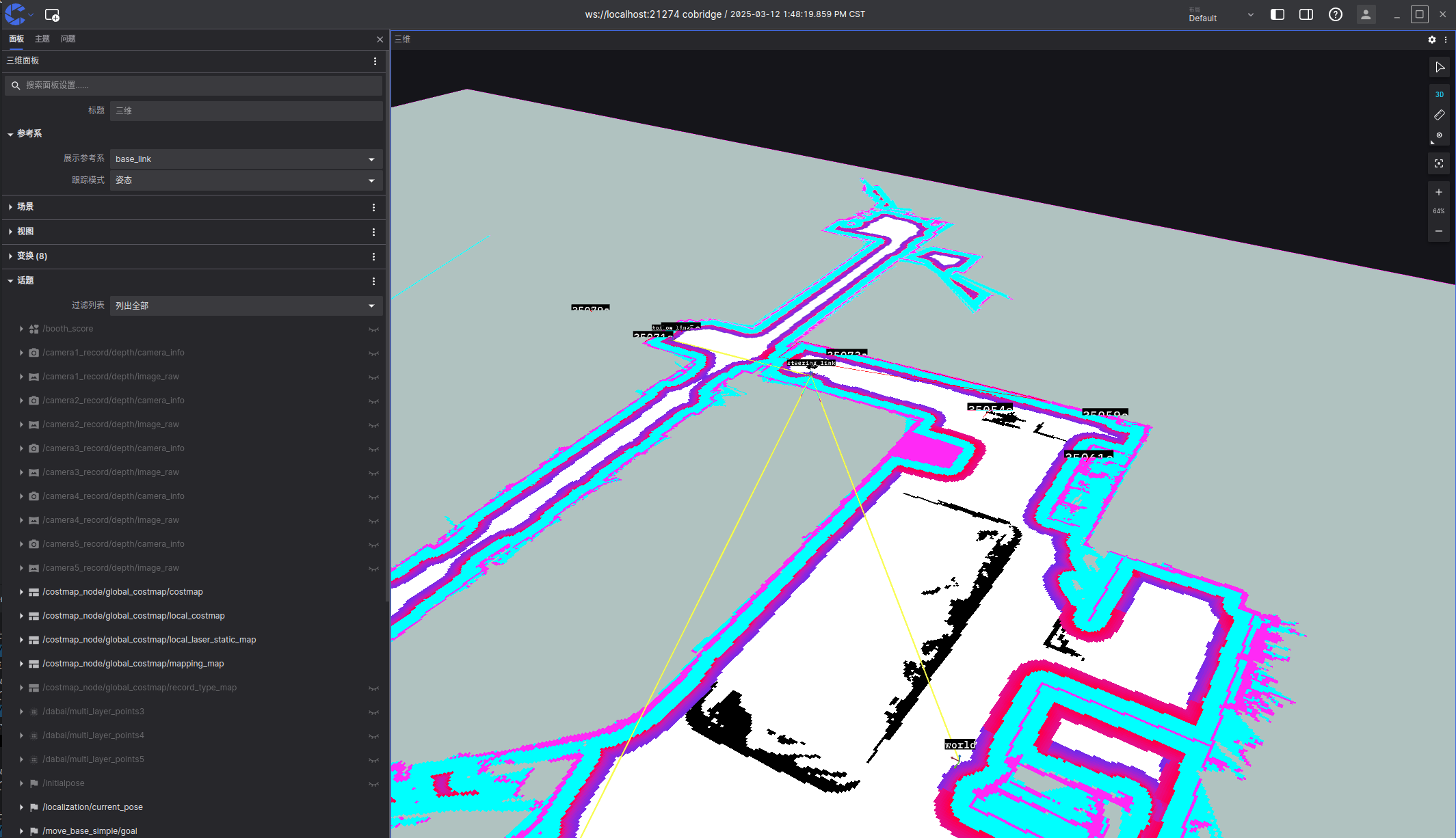
- 打开后即可使用不同面板对机器数据进行实时可视化。